| TITLE |
|---|
| AUTHORS |
| SOURCE |
(DOI: 10.1088/0031-9155/50/22/009)
|
| ABSTRACT |
|
A high-performance brain PET scanner, jPET-D4, which provides four-layer depth-of-interaction (DOI) information, is being developed to achieve not only high spatial resolution, but also high scanner sensitivity. One technical issue to be dealt with is the data dimensions which increase in proportion to the square of the number of DOI layers. It is, therefore, difficult to apply algebraic or statistical image reconstruction methods directly to DOI-PET, though they improve image quality through accurate system modelling. The process that requires the most computational time and storage space is the calculation of the huge number of system matrix elements. The DOI compression (DOIC) method, which we have previously proposed, reduces data dimensions by a factor of 1/5. In this paper, we propose a transaxial imaging system model optimized for jPET-D4 with the DOIC method. The proposed model assumes that detector response functions (DRFs) are uniform along line-of-responses (LORs). Then each element of the system matrix is calculated as the summed intersection lengths between a pixel and sub-LORs weighted by a Value from the DRF look-Up-table. 2D numerical simulation results showed that the proposed model cut the calculation time by a factor of several hundred while keeping image quality, compared with the accurate system model. A 3D image reconstruction with the on-the-fly calculation of the system matrix is within the practical limitations by incorporating the proposed model and the DOIC method with one-pass accelerated iterative methods.
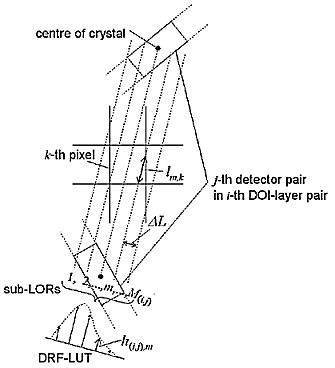 Fig. 3. The proposed system model based on line spread function models. Profiles of DRFs are pre-computed and stored as DRF look-up-tables (DRF-LUTs). The proposed system model is defined as the intersection length between image basis functions and sub-LORs, weighted by DRF-LUTs. Details are given in section 2.2. |
